
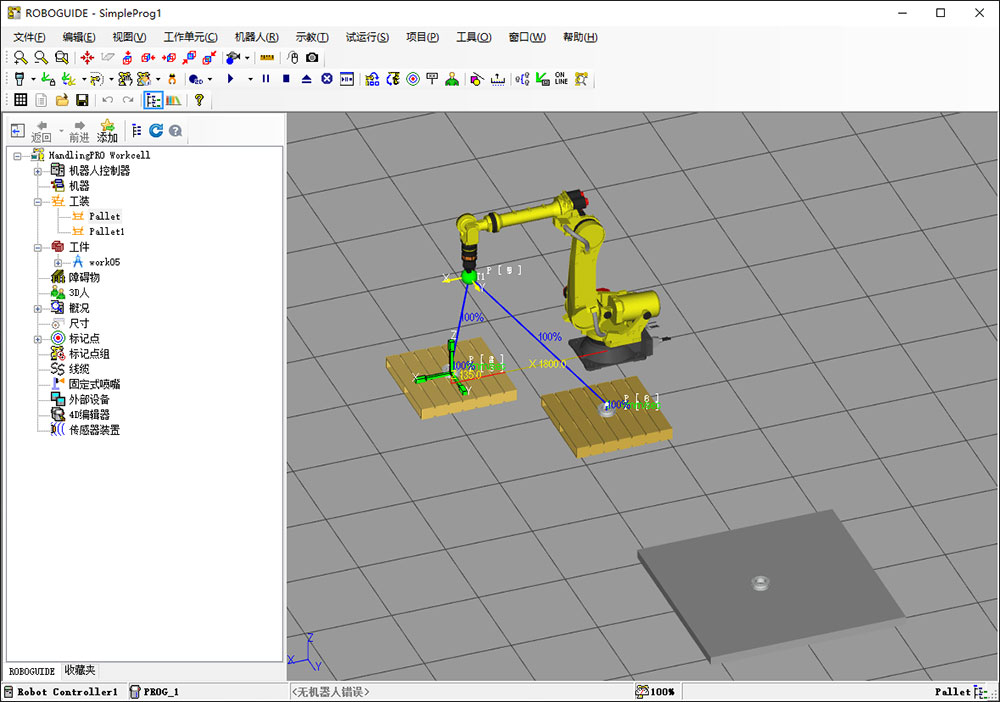
说实话,干自动化这行的人谁没被现场调试坑过?那种机器刚装好,程序一跑就撞机,或者节拍怎么调都达不到预期的狼狈样,真的让人头大。FANUC Roboguide 这款老家伙之所以能稳坐钓鱼台,核心就在那句“先在虚拟环境调通,再上线真实产线”。它最大的本事就是让你坐在办公室里,用电脑里的“虚拟机器人”把该撞的、该错的、节拍慢的地方全预演一遍。这不仅仅是省时间,更是保命——毕竟谁也不想因为一个路径规划失误,让几百万的设备当场报废。
很多人觉得安装个软件挺麻烦,尤其是这种工业级工具,但如果你手里有那个 9.4 中文特别版和对应的激活补丁,其实过程也就那样,解压、替换 Shared 目录下的 dll 文件,几步搞定就能免费用。别小看这个虚拟示教器,它的界面跟真家伙几乎一模一样,连报警逻辑都模拟得惟妙惟肖,很多培训机构拿它当教材也不是没道理的。
我自己在做项目时最依赖的就是它的碰撞检测和节拍分析功能,特别是那些复杂的汽车焊装线或者多机器人协同场景,在软件里把工件模型、输送线甚至安全围栏都搭进去跑一遍,能提前发现 90% 以上的隐患。再加上 WeldPRO 这种专门针对焊接优化的模块,不用拿着示教器一点点画轨迹,效率提升是肉眼可见的。当然,想玩得转也得配台好电脑,Win10/11、i7 处理器、16G 内存加张独显,这些硬件门槛是为了保证三维渲染不卡壳。总之,与其在现场干着急修机器,不如先在电脑里把逻辑理顺,这才是资深工程师该有的工作流。
FANUC Roboguide 9.4中文特别版安装教程:
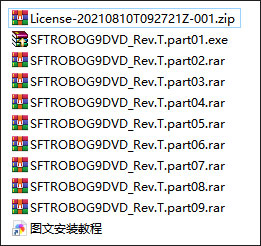
1、下载解压,得到机器人编程仿真软件FANUC Roboguide 9.4,以及激活补丁文件License-20210810T092721Z-001.zip;
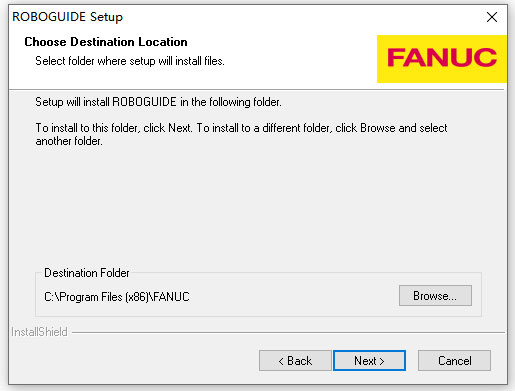
2、双击文件SFTROBOG9DVD_Rev.T.part01.exe将其解压出来,再选择Setup.exe,选择程序安装目录、组件,安装软件;
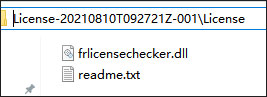
3、软件安装完成后,将激活补丁文件解压,复制frlicensechecker.dll到软件安装目录下Shared\Utilities替换原文件;
默认路径【C:\Program Files (x86)\FANUC\Shared\Utilities】
4、安装激活完成,打开软件即可免费使用。
软件优势
1、降低调试成本
传统机器人项目必须现场调试,存在停线时间长、风险高等问题。ROBOGUIDE 可提前完成 90% 以上的开发工作,大幅减少现场调试时间,提高项目交付效率。自动化集成商可以提前交付程序、提前验证逻辑,实现机械设计与机器人编程的并行开发。
2、降低设备风险。
通过在虚拟环境中提前发现碰撞、超程、姿态错误和节拍瓶颈等问题,避免了实际安装后的设备损坏和返工。
3、官方生态兼容性强。
作为 FANUC 官方软件,ROBOGUIDE 与 FANUC 控制器的一致性最高,工业现场的兼容性最好,工艺包也最为丰富。
FANUC Roboguide核心功能介绍
1、离线编程
ROBOGUIDE 可以在没有真实机器人的情况下完成机器人轨迹编写、TP 程序开发、工艺参数设置、I/O 逻辑测试以及动作流程验证。其虚拟示教器与真实 FANUC 控制器的界面几乎完全一致,工程师可以提前开发程序,调试人员无需占用生产设备,新项目的开发周期明显缩短。软件能够直接生成 FANUC 控制器可识别的运行程序。
2、三维机器人工作站仿真
ROBOGUIDE 支持完整的三维仿真环境,用户可以建立包括机器人、夹具、输送线、CNC 设备、安全围栏、变位机以及工装夹具在内的完整数字孪生产线。仿真能力涵盖机器人动作验证、工作范围分析、奇异点检查、节拍分析、多机器人协同以及碰撞检测,尤其适合汽车焊装线和自动化集成项目。
3、CAD 模型导入
ROBOGUIDE 支持导入多种 CAD 文件格式,包括 STEP、IGES、SAT、STL、SolidWorks 以及部分版本的 CATIA。工程师可以直接导入工件模型、机械设备和工装夹具,无需重新建模。新版 ROBOGUIDE V10 对原生 CAD 格式的支持进一步增强。
4、碰撞检测
碰撞检测是工业机器人仿真的最关键功能之一。ROBOGUIDE 可实时检测机器人与设备的碰撞、机器人之间的碰撞、工件干涉以及轨迹越界。对于复杂多机器人产线,这一功能尤为重要。在正式安装前即可发现问题,从而避免设备损坏、减少现场返工、缩短项目周期。
5、虚拟示教器
ROBOGUIDE 完整模拟了真实 FANUC 示教器的全部功能(称为 iPendant)。工程师可以在虚拟环境中编写 TP 程序、调试宏程序、测试 I/O、验证报警以及模拟运行。由于虚拟示教器与真实设备高度一致,学会 ROBOGUIDE 基本等于掌握了 FANUC 机器人的编程方法,这也是许多培训机构使用该软件进行教学的原因。
软件行业专用模块
WeldPRO 焊接模块适用于汽车白车身、钢结构、工程机械和压力容器等行业,可大幅减少焊接示教时间。PalletPRO 码垛模块适用于食品饮料、仓储物流、化工和医药行业,支持大量标准码垛模板。PaintPRO 喷涂模块常见于汽车喷涂、家电外壳和金属喷漆等场景。
1、WeldPRO
焊接自动化,焊枪轨迹规划、自动路径生成、焊缝工艺模拟、多机器人协同焊接、焊接姿态优化。
2、PalletPRO
码垛搬运,托盘布局生成、箱型优化、输送线仿真、节拍分析、多托盘策略。
3、PaintPRO
喷涂机器人,自动喷涂轨迹生成、喷枪角度优化、覆盖率分析、涂层均匀性模拟。
系统要求
1、操作系统
Windows 10 或 Windows 11 的 64 位版本
2、处理器
推荐 Intel i7 或 AMD 同级别及以上的多核 CPU,主频 3.0 GHz 以上。
3、内存
建议配置 16 GB 或以上,对于包含多台机器人的大型产线仿真,32 GB 可获得更好的性能体验。
4、硬盘
推荐使用 SSD,预留 50 GB 以上的可用空间(软件安装包及项目文件会占用较大容量)。
5、显卡
建议使用支持 DirectX 11 或更高版本的独立显卡,4 GB 显存或以上,以确保三维图形的流畅显示和渲染性能。




























共有 0条评论